
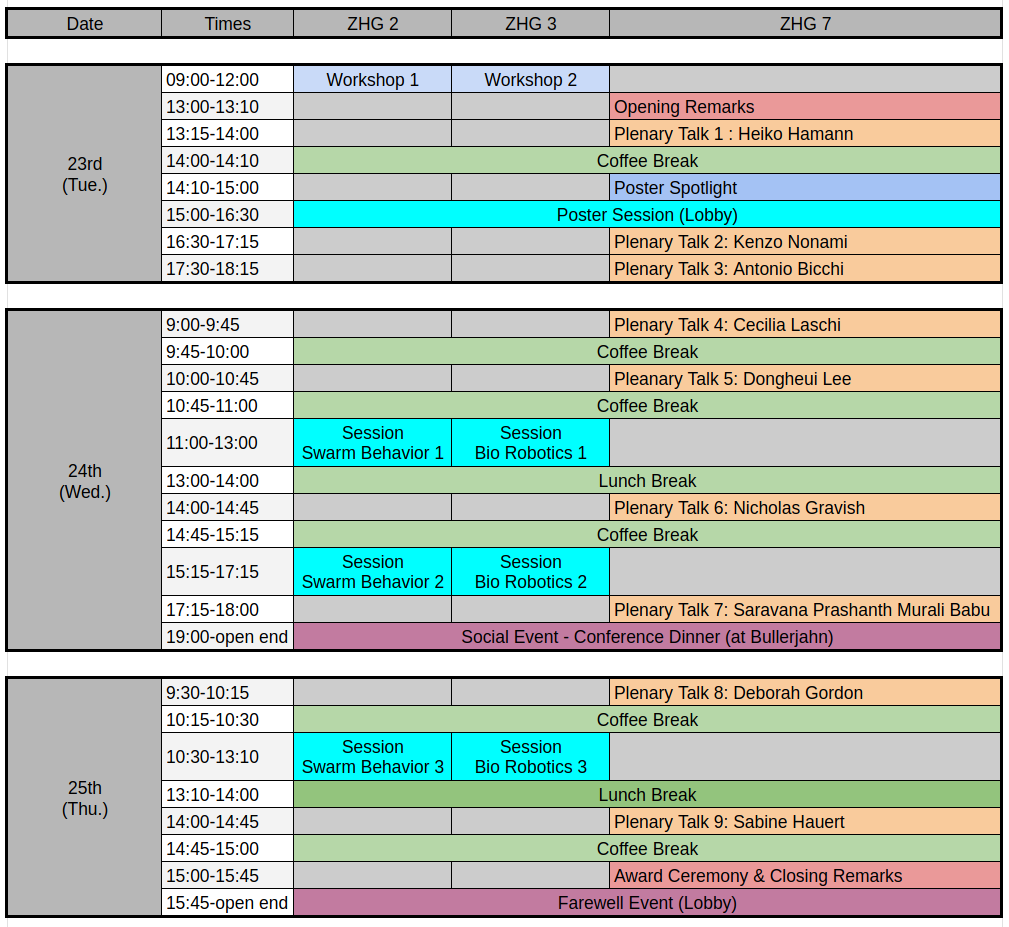
PROGRAM AT A GLANCE
(Last updated on September 18th.)
For Plenary Talks including Abstracts click here
SPEAKER INSTRUCTIONS
For Oral Sessions
- Each speaker is allocated a total of 20 minutes.
- Organizers do not provide PCs in session rooms; please bring your own laptop PC that can be connected to HDMI for your presentation.
For Poster Sessions
The poster sessions (poster spotlight and interactive sessions) will be held on 23th September in the foyer of the Central Lecture Hall building, the spotlight will take place in Lecture Hall 7.
Poster Spotlight Session (14:10-15:00)
- You have two minutes to introduce the topic of your poster.
- Spotlights will use the same PC, which we will provide. Presenters must upload their spotlight presentation (PDF or PPTX) before the Spotlight session using a memory stick.
Poster Interactive Session (15:00-16:30)
- You are responsible for printing, setting up, and taking down your poster. Organizers do NOT provide a printer; please print your own poster in advance and bring it with you. Place the poster on the panel labeled with your submission ID before the spotlight session (14:00-14:10), and remove it before you leave.
- Posters will be displayed on poster display boards that are distributed in the foyer.
- The poster should follow the International Standards Organization (ISO) size A0. The dimensions for the A0 format are 84 cm x 119 cm. The orientation of the poster should be portrait.
FOR POSTER SESSION AUDIENCE
Vote for the 1st, 2nd and 3rd best presentations by 18:00 on September 23rd using the provided voting sheets.
You can vote only once.
The Best Poster Awards will be announced at the Award Ceremony.
TECHNICAL PROGRAM
23rd, Tuesday
From 11am onwards conference registration
- 9:00h – 12:00 Workshop 1 and Workshop 2 (parallel) DETAILED INFO
Workshop 1 – Harsh environment robotics
11:15 – 12:00 Keynote Talk: Masayoshi Tomizuka
Intelligent, Autonomous and Swarm Control of Robots in Harsh Environment
Workshop 2 – Muscle to Mobility (M2): Crafting Soft Robots with Bioinspired Design Principles - 13:00 – 13:10 Opening Remarks
- 13:15 – 14:00 Plenary Talk 1: Heiko Hamann (Chair: Florentin Wörgötter)
Human-Swarm Interaction and Time: Subjective Time-Perception as a Plastic Feature - Coffee Break
- 14:10 — 15:00 Poster Spotlight
- 15:00 – 16:30 Poster Session / Coffee parallel
Poster Session
[03] Konstantin Möller, Minija Tamosiunaite, Florentin Wörgötter. Unsupervised learning to forage following feature combinations
[04] Luna Rusteberg, Minija Tamosiunaite and Florentin Wörgötter. Recurrent neural network trained unsupervised to discover feature combinations
[05] Yuto Fukao, Yuya Shimizu, Ryohei Michikawa, Kiona Hosotani, Ryusuke Fujisawa, Tetsushi Kamegawa, and Fumitoshi Matsuno. Development of Wheels and a Tail for a Two-Wheeled Lunar Rover
[22] Claudio Feliciani, Zeynep Yacel, Hisashi Murakami, Yuto Uesugi, Takenori Tomaru, Tamao Maeda and Sakurako Tanida. Quantifying swarm reorganization in soldier crabs under external threats
[24] Tomohiro Hayakawa, Ryusuke Fujisawa, Yuki Tanigaki and Fumitoshi Matsuno. Task allocation strategy for reconfigurable modular robots based on trophallaxis and cannibalism
[25] Ryohei Michikawa, Kiona Hosotani, Xixun Wang, Yuki Takagi, Haruho Mitsunaga, Mihiro Nakabayashi, Guang Yang, Ryusuke Fujisawa, Akio Noda, Tomohiro Hayakawa, Hiroshi Oku and Fumitoshi Matsuno. Development of Robot Module Connectors with Dustproof and Passive Error Compensation Functions Using Metal Sheets
[27] Mau Adachi, Tomoya Kamimura, Yuichi Ambe, Yasuo Higurashi, Naomi Wada, Fumitoshi Matsuno and Shinya Aoi. Asymmetrical body structures producing symmetrical running in quadrupedal mammals
[31] Guang Yang, Xixun Wang, Ryohei Michikawa, Kiona Hosotani, Yuya Shimizu, Tetsushi Kamegawa, Ryusuke Fujisawa and Fumitoshi Matsuno. Vision-Based Docking of Limited-DoF Modules for Reconfigurable Modular Robots
[32] Xixun Wang , Tomohiro Shimomura, Ryo Ariizumi and Fumitoshi Matsuno. Simultaneous optimization of structure and control of modular robots on rough terrain considering leg and wheel modules
[34] Yongdong Wang, Runze Xiao, Jun Younes Louhi Kasahara, Shota Chikushi, Keiji Nagatani, Atsushi Yamashita and Hajime Asama. A Human-in-the-Loop DAG Refinement Framework for LLM-Driven Multi-Robot Construction Task Planning
[37] Tomoki Tokiwa, Shun-ichi Azuma and Ikumi Banno. Feasible Learning Problems for Networks of Conditioning Logical Devices: Characterization by Output Controllability with Periodic State Preservation
[41] Yuki Takagi, Kazuki Shibata, Hiroshi Oku, Yuki Tanigaki, Guang Yang, Xixun Wang, Ryohei Michikawa and Fumitoshi Matsuno. Development of a Health Monitoring Scheme on Mechanical Connection Motion of Modular Robots
[43] Giuseppe Antonio Patarino, Volker Strobel and, Marco Dorigo. Modeling information propagation in robot swarms through epidemiological models
[48] Hun Jang and Liang Li. Effects of Tail Stiffness on Swimming Performance in Individual and Schooling Conditions
[57] Ryohei Michikawa , Hiroshi Yokoi and Fumitoshi Matsuno. A Neuro-musculoskeletal Model-based Algorithm for Virtual Weight Presentation via Electrical Muscle Stimulation
[59] Ryuusei Nishii, Kenichiro Satonaka, Ryota Kinjo, Hiroshi Oku, Yuki Tanigaki, Tomohiro Shimomura, Guang Yang, Xixun Wang, Fumitoshi Matsuno and Ryo Ariizumi. Isomorphism Determination Method for Modular Robots Using Graph Neural Networks
[63] Aki Matsutaka, Shun-ichi Azuma and Ikumi Banno. Diffusion-model-based Coordination of Multi-agent Systems: Achieving Formations Similar to–but Distinct from–References
[64] Takatoshi Hashimoto, Tomoya Kamimura, Sota Tsuchida, Tomoki Nakagawa, Yuichi Ambe, Mau Adachi and Shinya Aoi. Stability change in a quadruped robot by stride frequency via neuromechanical resonance
[65] Sota Tsuchida, Tomoya Kamimura, Takatoshi Hashimoto, Tomoki Nakagawa, Yuichi Ambe, Mau Adachi, and Shinya Aoi. Gait stability landscape of a quadruped robot governed by neuromechanical resonance
[67] Momiji Yoshikawa and Ikkyu Aihara. Wavy synchronization in locomotion of train millipedes : From automatic tracking to a phase oscillator model
[69] Thirawat Chuthong and Poramate Manoonpong. A Differential Steering Mechanism for Directional Adaptation and Self-Organized Locomotion under Decentralized Control in Legged Robots
[70] Tenta Suzuki, Yuta Tobe, Tomohiro Harada, Johei Matsuoka and Kiyohiko Hattori. Pheromone-Reward Reinforcement Learning for Trajectory Design of Multi-Agent: Evaluation Using Lane-less Self Driving as a Case Study
[71] Masashi Shiraishi and Hiraku Nishimori. Effects of An Interaction Network Structure on the Task Allocation Dynamics Generated by the Response-Threshold Model
- 16:30 – 17:15 Plenary Talk 2 : Kenzo Nonami (Chair: Fumitoshi Matsuno)
Heterogeneous Swarm Flight by a Cerebral AI Drones - 17:30 – 18:15 Plenary Talk 3: Antonio Bicchi (Chair: Tomas Kulvicius)
On some abstract lessons learnt from nature, and concrete applications thereof
24th, Wednesday
- 9:00 – 9:45 Plenary Talk 4: Cecilia Laschi (Chair: Koichi Suzumori)
Lessons from nature for soft robotics - Coffee Break
- 10:00 – 10:45 Plenary Talk 5: Dongheui Lee (Chair: Tommy Gravdahl)
Human-Centric Approaches for Robot Learning and Interaction with Human - Coffee Break
- 11:00 – 13:00 Specific Sessions (2 Parallel Sessions)
Swarm Behavior 1 (Chair: Minija Tamosiunaite)
[07] Yigal Koifman , Erez Koifman, Eran Iceland, Ariel Barel, and Alfred M. Bruckstein. VariAntNet: Learning Decentralized Control of Multi-Agent Systems
[10] Tomoki Umezaki , Masaki Ogura, Takayuki Nakamura, Shodai Suzuki, Tsutomu Takagi, Tomonori Yoshikawa, Shunsuke Torisawa, Keitaro Kato, Youhei Washio, Shukei Masuma, Naoki Wakamiya . Modeling Fish Schooling Behavior for Selective Fishing in Set Net Fisheries
[11] Glenn R. Varhaug , Jarle Dorum, Jan Tommy Gravdahl, Elias Prytz, and Henrik Vasbotten . Agricultural weed control by a swarm of robots
[12] Aymeric Vellinger, Nemanja Antonic and Elio Tuci. From Pheromones to Policies: Reinforcement Learning for Engineered Biological Swarms
[14] Wei Wang and Qi Wang . Robust UAV Formation Control via Improved ESO and SMC: From Wind-Disturbed Simulations to Real-World Flights
[15] Makoto Eguchi and Kazuaki Yamada. Autonomous Role Allocation in Multi-Agent Systems: Inspired by Ant Division of Labor
Bio Robotics 1 (Chair: Tomoya Kamimura)
[19] Fumitoshi Matsuno, Xixun Wang, Guang Yang, Kiona Hosotani, Ryohei Michikawa, Tetsushi Kamegawa, Yuya Shimizu, Motoyasu Tanaka, Ching Wen Chin, Ryusuke Fujisawa, Ryo Ariizumi, Koki Harada, Tomohiro Hayakawa, Yuichi Ambe, Akio Noda, Hiroshi Oku, Takashi Takuma, Ryota Kinjo, Yuki Tanigaki, Noritaka Sato, and Kotaro Kanazawa. Self-Reconfigurable Modular Robots for Lunar Exploration and Base Construction ” Overview and Interim Results of a Research Theme within the Moonshot Project
[09] Shingo Onizuka , Ryohei Michikawa, Yuto Fukao, Xixun Wang, Haruho Mitsunaga, Soshi Yoneda, Yuki Takagi, Yousuke Izuno, Mihiro Nakabayashi, Reo Nishino, Yuya Shimizu, Ryosuke Inoue, Syota Uryu, Akio Noda, Takashi Takuma, Hiroshi Oku, Tomohiro Hayakawa, Tetsushi Kamegawa, Fumitoshi Matsuno and Ryusuke Fujisawa. Enhancing Morphological Diversity and Demonstrating Control Robustness of Polyhedral Modular Rovers
[30] Mayu Kikuchi ,Yasumasa Tamura and Masahito Yamamoto . Building a Motion Embedding Space for Annotation-Free Animal Behavior Recognition
[21] Haruhiro Sato, Ku Esaki and Kazuyuki Ito . Bio-Inspired Spiral Soft Arm Based on an Animal Tongue
[23] Xixun Wang and Ryohei Michikawa and Fumitoshi Matsuno . Autonomous Exploration of Mobile Robots in Unknown Uneven Terrain Inspired by Insect Locomotion Strategies
[26] Haruki Aoyama , Kotaro Kanazawa, Ching Wen Chin, Guang Yang, Xixum Wang, Ryohei Michikawa, Noritaka Sato, Motoyasu Tanaka, Akio Noda, Fumitoshi Matsuno . Development of a Remote Monitoring User Interface for Self-organized Modular Robots for Lunar Exploration
- Lunch Break
- 14:00 – 14:45 Plenary Talk 6: Nicholas Gravish (Chair: Minija Tamosiunaite)
The symbiotic mutualism of robotics and biology - Coffee Break
- 15:15 – 17:15 Specific Sessions (2 Parallel Sessions)
Swarm Behavior 2 (Chair: Simon Blaue)
[16] Taiki Watanabe, Yuki Tanigaki, Tomohiro Hayakawa, Fumitoshi Matsuno, and Ryusuke Fujisawa . Enhancing Swarm Foraging Efficiency via Dynamic Task Switching and Threshold Diversity
[17] Haruto Maeda and Masaki Ogura . Modeling and Analysis of Locust Swarms with OR35-Deficient Individuals
[29] Jie Song ,Yang Bai, Mikhail Svinin and Naoki Wakamiya . Autonomous Detection and Coverage of Unknown Target Areas by Multi-Agent Systems
[50] Alexander Puzicha . Modular Cross-Platform Software Design for the Autonomy Core of Decentralized Heterogeneous Mobile Robot Swarms
[38] Asad Razzaq , Senshu Wakayama, Mazhar Manzoor, and Toshiyuki Yasuda . Evolutionary Approach for Optimization of Perceptual Abilities and Group Composition in Heterogeneous Robotic Swarms
[45] Ruiheng Wu, Oliver Deussen, Iain D. Couzin and Liang Li. AutoPercep: A Pipeline for Onboard Neighbor Position Estimation Toward Scalable Swarm Robotics
Bio Robotics 2 (Chair: Poramate Manoopong)
[33] Gantogoo Oyunbat, Sven Lange, Zhenshan Bing and Florian Röhrbein . Position Estimation Experiment on Bio-inspired Robotic Mouse with Inertial Measurement Unit
[35] Yongxu Ren, Felix Deichsel, Jürgen Seiler, Andr´e Kaup, Philipp Beckerle. Enhancing LLM Inference with Human Expert Knowledge: A Case Study on Mobile Robotics Fault Diagnosis and Prediction
[46] Mohamed Aziz Zouita, Ahmad Hammad and Sophie F. Armanini . Development of a Bio-Inspired Takeoff Mechanism for Flapping-Wing Micro Aerial Vehicles
[47] Kenichiro Satonaka , Ryusei Nishii, Ryota Kinjo, Seiichi Ohashi, Tomoya Negoro, Yuki Takagi, Hiroshi Oku, Yuki Tanigaki, Koki Harada, Ryo Ariizumi, Tomohiro Simomoura, Guang Yang, Xixun Wang, and Fumitoshi Matsuno,. Optimization of Autonomous Transformation Paths in Modular Robots via Structure Graph Encoding and Isomorphism Determination
[53] Mao Tobisawa, Tenta Suzuki, Clive Jancen Kawaoto,Yuki Itoh, Kaito Kumagae, Tomohiro Harada, Johei Matsuoka, and Kiyohiko Hattori . Efficient and Safe Bidirectional Traffic Control in Lane-less Environments Using Global Reward and Curriculum Learning
[54] Clive Jancen Kawaoto, Tenta Suzuki, Mao Tobisawa, Yuki Itoh, Kaito Kumagae, Johei Matsuoka, and Kiyohiko Hattori. Probabilistic Path Selection Method in Planetary Exploration: Improving Terrain Adaptability through Tethered Cooperative Rover Systems
- 17:15 – 18:00 Plenary Talk 7: Saravana Prashanth Murali Babu (Chair: Poramate Manoonpong)
From Nature to Robots: Exploring Modular Locomotion and Evolution - 19:00 – Social Event (Dinner)
25th, Thursday
- 9:30 – 10:15 Plenary Talk 8: Deborah Gordon (Chair: Fumitoshi Matsuno)
The ecology of collective behavior - Coffee Break
- 10:30 – 13:10 Specific Sessions (2 Parallel Sessions)
Swarm Behavior 3 (Chair: Tomas Kulvicius)
[36] Yinan Shi, Georgios Tzoumas, Thomas Richardson and Sabine Hauert. Validating the Potential of Multi-UAV Systems to Mitigate Large-scale Wildfires Based on Historical Data and Fire Modeling
[51] Pranav Rajbhandari, Abhi Veda, Matthew Garratt, Mandayam Srinivasan and Sridhar Ravi . Understanding visual attention behind bee-inspired UAV navigation
[58] N. Charuvajana, X.Y. Tan, P. Rithburi, S. Srigrarom , B.C. Khoo and F. Holzapfel . Aerial Interception of Multiple Drones by Multiple Distributed Chasers with Batch Deployments
[60] Shenbagaraj Kannapiran, Elena Oikonomou, Albert Chu , Spring Berman, and Theodore P. Pavlic,. Ant-inspired Walling Strategies for Scalable Swarm Separation: Reinforcement Learning Approaches Based on Finite State Machines
[62] Kristina Wogatai and Wilfried Elmenreich . Utilization of Cohesion and Adhesion Forces in Plasmodial Slime Molds for Network Information Transfer
[39] Kohei Ohashi, Rei Hiraoka, Syoma Kamata, Raj Rajeshwar Malinda. Hiroaki Kawashima, Hitoshi Habe and Takayuki Niizato. Visual manipulation of group behavior in Plecoglossus altivelis via projected dot patterns
[20] Hossein B. Jond . Position-Based Flocking for Robust Alignment
Bio Robotics 3 (Chair: Florentin Wörgötter)
[56] Yuki Tanigaki and Yano Mikito. Multi-Objective Optimization of Module Configuration and Task Allocation for Modular Robots of the Lunar Exploration Project
[68] Simon Blaue, Minija Tamosiunaite and Florentin Wörgötter. Recording and Analysis of Interactive Human Reaching Motions with Cooperative Collision Avoidance
[06] Pasut Suriyasomboon, Rene M. Suarez Flores, Sajid Nisar. Design and Development of A Bio-Inspired Anthropomorphic Finger for Dexterous Robotic Hands
[08] Koki Harada, , Ryo Ariizumi, Xixun Wang, Ryota Kinjo and Fumitoshi Matsuno . Graph Grammar Definition Language GGDL and its application
[13] Kenta Okumura , Motoaki Hiraga, Kazuhiro Ohkura, Arata Masuda . Improving Topological Diversity in Mutation-Based Evolving Artificial Neural Network via Multi-Objective Optimization
[55] Tenta Suzuki, Mao Tobisawa, Clive Jancen Kawaoto, Kaito Kumagae, Yuki Itoh, Kenji Matsuda, Junya Hoshino, Tomohiro Harada, Jyouhei Matsuoka and Kiyohiko Hattori. Improving DRL Policies via Explainable Action Correction Based on Accident Cause Analysis
[42] Yuichi Ambe, Takashi Takuma, Tomohiro Hayakawa and Fumitoshi Matsuno. Static Pose Optimization to Reduce Connector and Joint Loads in a Modular-Limbed Quadruped with Position-Controlled Joints
[28] Tomoya Kamimura, Yuya Oshita, Mau Adachi, Yuichi Ambe, Akihito Sano, Naomi Wada, Shinya Aoi and Fumitoshi Matsuno. Dynamical Effects of Asymmetry Body Flexibility on Cheetah Running Gait
- Lunch Break
- 14:00 – 14:45 Plenary Talk 9: Sabine Hauert (Chair: Shinya Aoi)
From Nano to Macro: Building Trustworthy Swarms for People - Short Break
- 15:00 – 15:45 Poster and Paper Award Ceremony and Closing Remarks
- 15:45 – Farewell Event
Workshops – September 23, 2025 – 9:00-12:00
Workshop 1
Harsh environment robotics
- 9:00 – 9:05 Introduction
- 9:05 – 9:35 Paper 1
Title: Fuel cell system development for harsh environment at F-REI
Authors: Akihiro Iiyama, Goh Matsuo, Tetsuya Kamihara, Keiji Okada, Atsuko Fukaya, Satoru Imazu, and Masanari Yanagisawa - 9:35 – 10:05 Paper 2
Title: Fluid powered robots for harsh environments
Authors: Koichi Suzumori - 10:05 – 10:35 Paper 3
Title: Aerial Interception of Multiple Drones by Multiple Distributed Chasers with Batch Deployments
Authors: Nontaphat Charuvajana, Panithan Rithburi, Sutthiphong Srigrarom, Boo Cheong Khoo, and Florian Holzapfel - 10:35 – 11:20 Paper 4
Title: Tele-operated Robot Having Real Haptics Capability in Harsh Environment
Authors: Kouhei Ohnishi, Yuki Saito, Hiroshi Asai, Kasun Prasanga - 11:20 – 12:05 Keynote Talk – Masayoshi Tomizuka
Topic: Intelligent, Autonomous and Swarm Control of Robots in Harsh Environment
Workshop 2
Muscle to Mobility (M2): Crafting Soft Robots with Bioinspired Design Principles
- 9:00 – 9:15 Welcome and Opening Remarks
Saravana, Henrik and Etienne - 9:15 – 9:40 Neuroscience Control Strategies
Prof. Dr. Henrik Jörntell - 9:40 – 10:05 Simulating Movement Science
Dr. Hari Teja - 10:05 – 10:30 Control of Bioinspired Robots
Prof. Poramate Manoopong - 10:30 – 10:55 Human Robotics
Prof. Dr. Etienne Burdet - 10:55 – 11:20 Soft Robotics
Prof. Dr. Cecilia Laschi - 11:20 – 11:45 Bioinspired Design Process
Dr. Junior Rojas and Assistant Prof. Dr. Saravana - 11:45 – 12:05 Panel discussion
Panelist (all speakers) - 12:05 Goodbye Notes